ふじみんロボット修理プロジェクト
ふじみんロボットの調子が悪いということで電子工作ラボに運び込まれました。動くには動くけど、ふとした瞬間に止まってしまう、というのです。このロボットの回路を調査し、復旧を試みることになりました。
修理が完了するまで、進捗があるたびに記事化していこうと思います。本記事はシリーズ 1 回目ということで、現在のロボットの状態を観察していきます。

ふじみんロボットとは
ふじみんとは、埼玉県ふじみ野市のマスコットキャラクターのことです1。桜色の体に富士山の帽子(?)を被っている、大変かわいらしいキャラクターです。そのふじみんをかたどったロボットが、今回修理を行うふじみんロボットです。
このふじみんロボット、実は私とその他何人かで製作したものです。私が制御回路とプログラミングを担当しました。しかし、かなり昔の話で、どんな作りだったかほとんど覚えていません。ドキュメント等も残っていないため、今回の修理プロジェクトはさながら他人が作ったものを修理するイメージで進めていこうと思います。
ロボットの首の構造
ふじみんロボットの構造を調べます。まずは首の部分から。

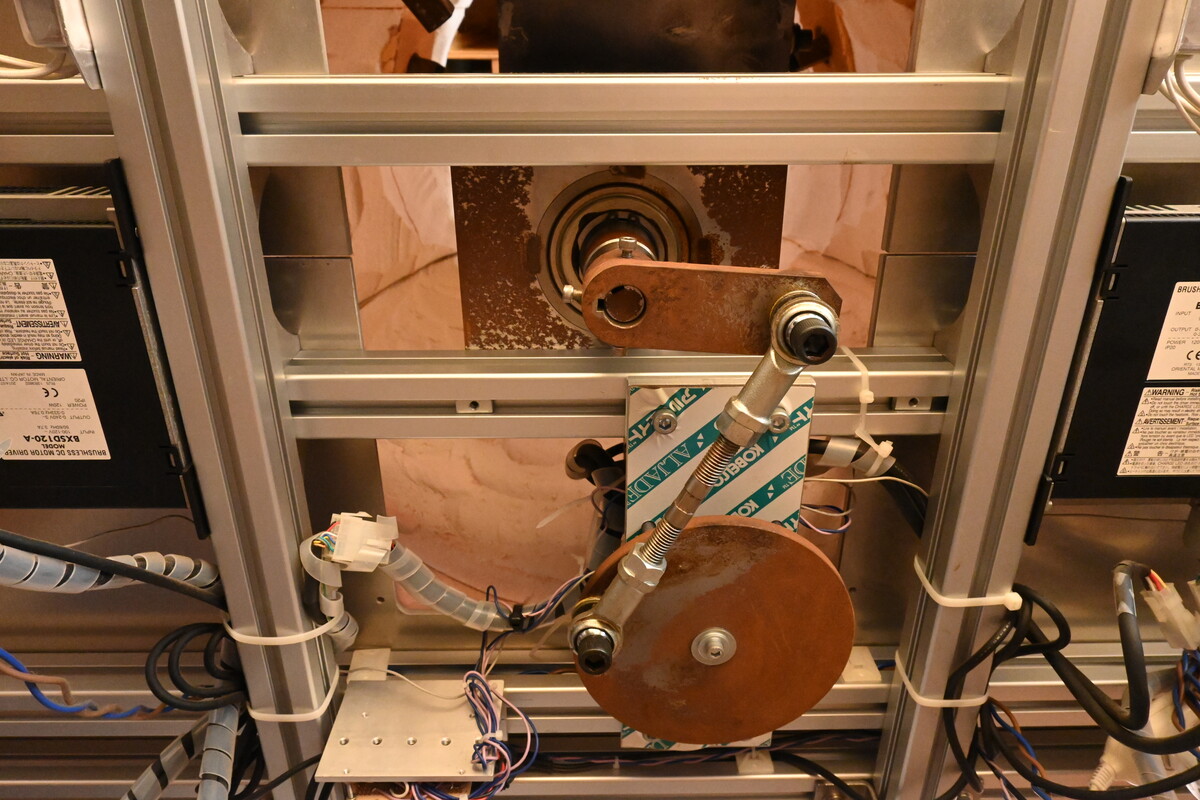
ロボットの首は、写真の通り軸部品で構成されています。頭部が軸に固定されていて、軸を支える土台は胴体に固定されています。

ロッドを介してモーターと軸が接続されていて、首が前後に動くようになっています。

軸部分の後ろ側には位置検出センサーが取り付けられています。フォトインタラプタと、光を遮るための金属板です。金属板がフォトインタラプタを通過する瞬間を頭の原点角度としていると思います。
ロボットの座面の構造
ロボットの台座を下から覗くと、次の画像のようにたくさんの配線を見ることができます。

中央にあるのが頭部を左右に回転させるためのモーターと軸です。左右に 1 つずつ見える黒い箱がモータードライバです。左奥には制御回路が配置されています。
写真の下部に映っている円盤がモーターに接続された円盤です。写真の上部に映った軸が頭部に繋がる軸です。両者がリンク機構2で接続され、モーターの回転により頭部が左右に回転します。
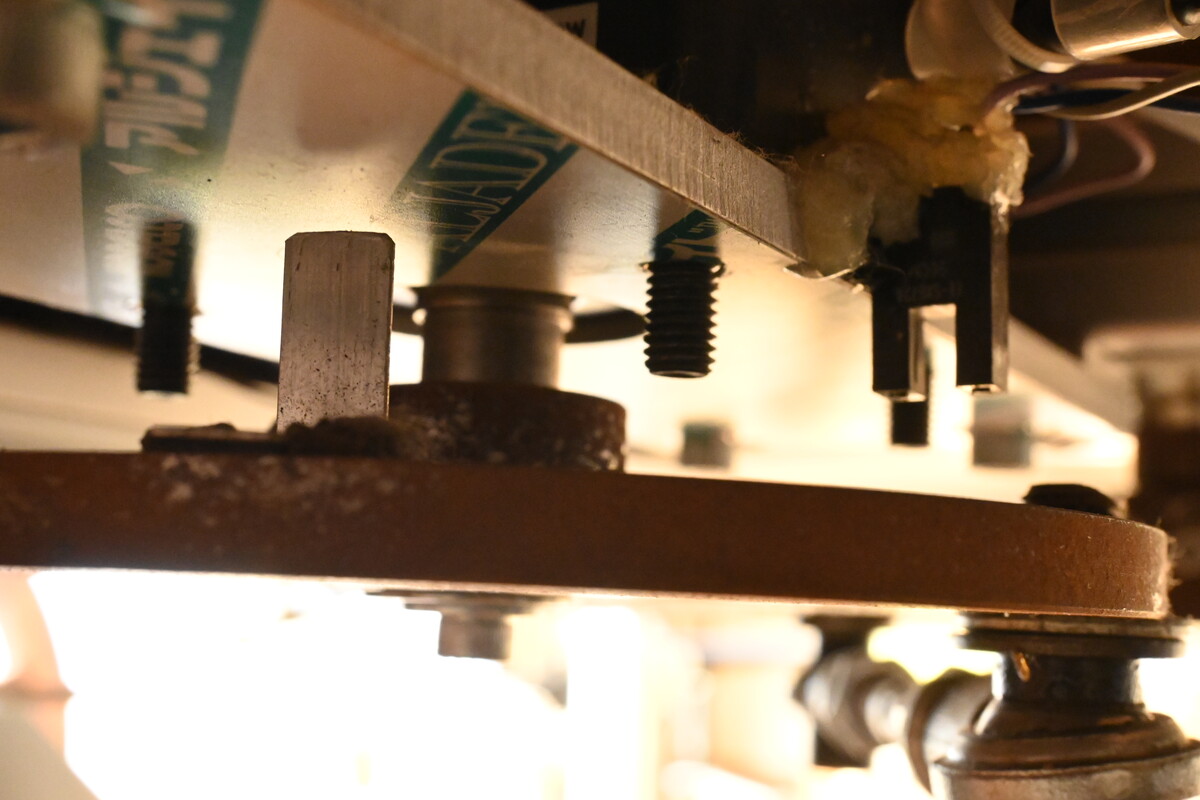
首部分と同様、こちらにもフォトインタラプタと金属板で構成されたセンサー機構が備わっています。左右回転の原点角度を検出します。
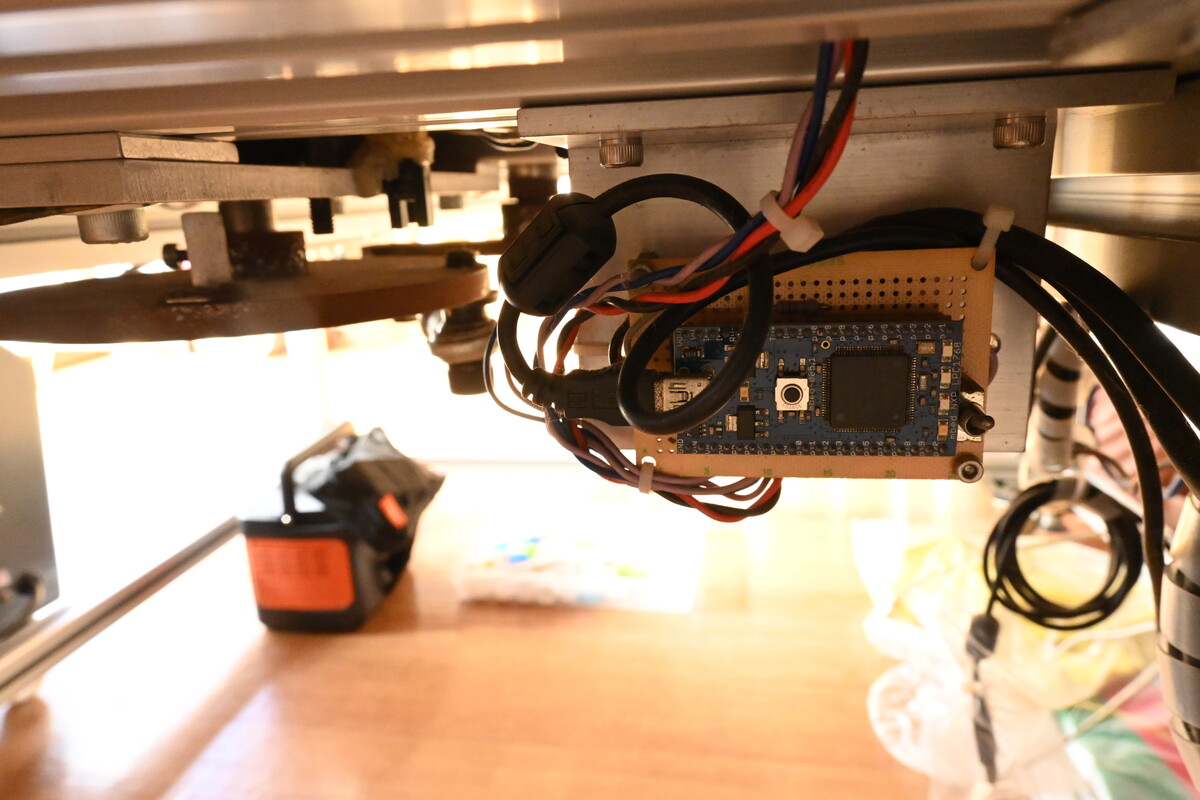
写真右に写ったマイコンボードで全体を制御しています。基板にNXP LPC1768と印字されていて、どうやらmbedマイコンのようですね。mbed LPC1768 | Mbedにピン配置などが書かれています。今後の修理作業で役立つでしょう。
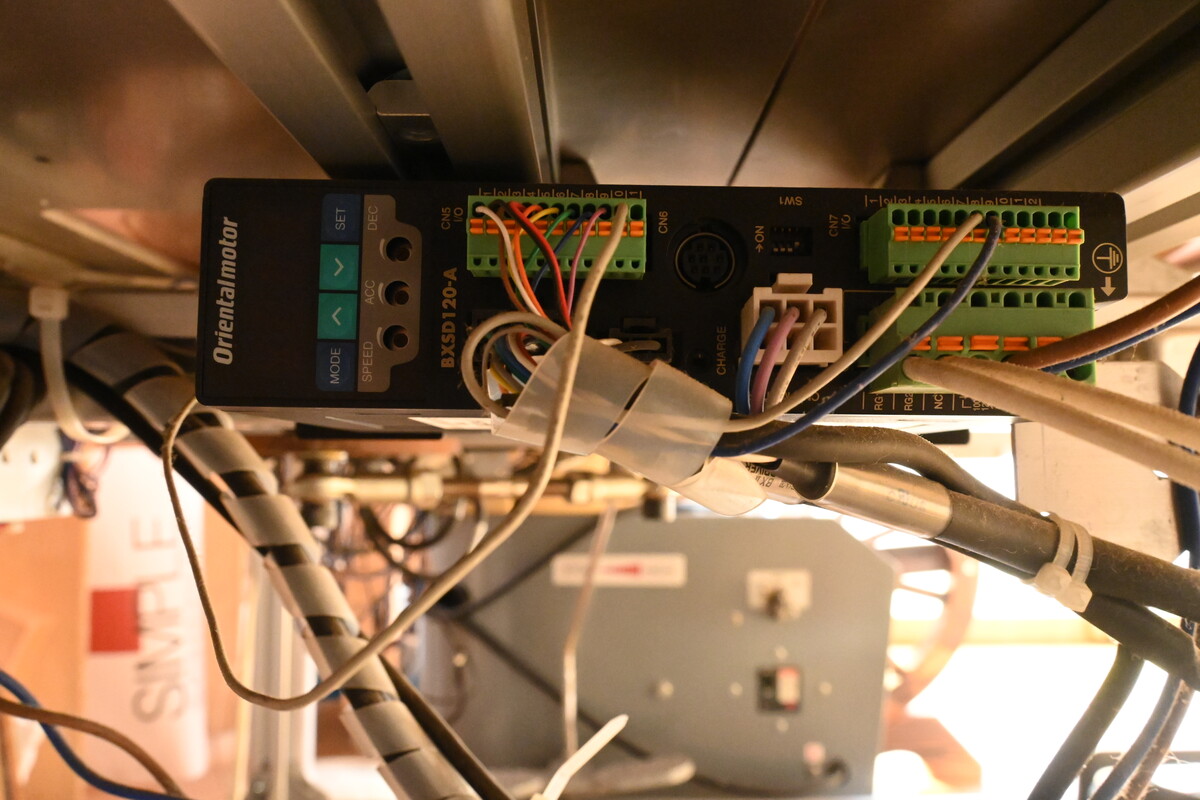
最後にモータードライバを見ておきます。型番の印字が「BXSD120-A」とありますね。少し調べてみると、オリエンタルモーターのBXⅡシリーズだということが分りました。このページの「ダウンロード」から手に入れられる取扱説明書には「BXSD120-A2」が記載されています。ちょっと型番が違いますが、マイナーチェンジだろうと思います。ピン配置などは同じだと仮定して進めていきます。
- [1]: ふじみ野市PR大使「ふじみん」誕生の経緯/ふじみ野市
- [2]: で合ってますかね?機械にはあまり詳しくないので、間違っていたら教えてください。
この記事は以下の記事から参照されています。