ふじみんロボット修理プロジェクト その2
前回はふじみんロボットの大まかな構造やモータードライバの型番を調べました。今回はその続きで、ロボットの制御方法を解析していきます。まず回路図を復元し、次にモータードライバの制御信号などから制御方法を推測します。
制御回路
制御基板に乗ったマイコンボードを取り外すと、その内側に実装された IC が判明しました(下図)。
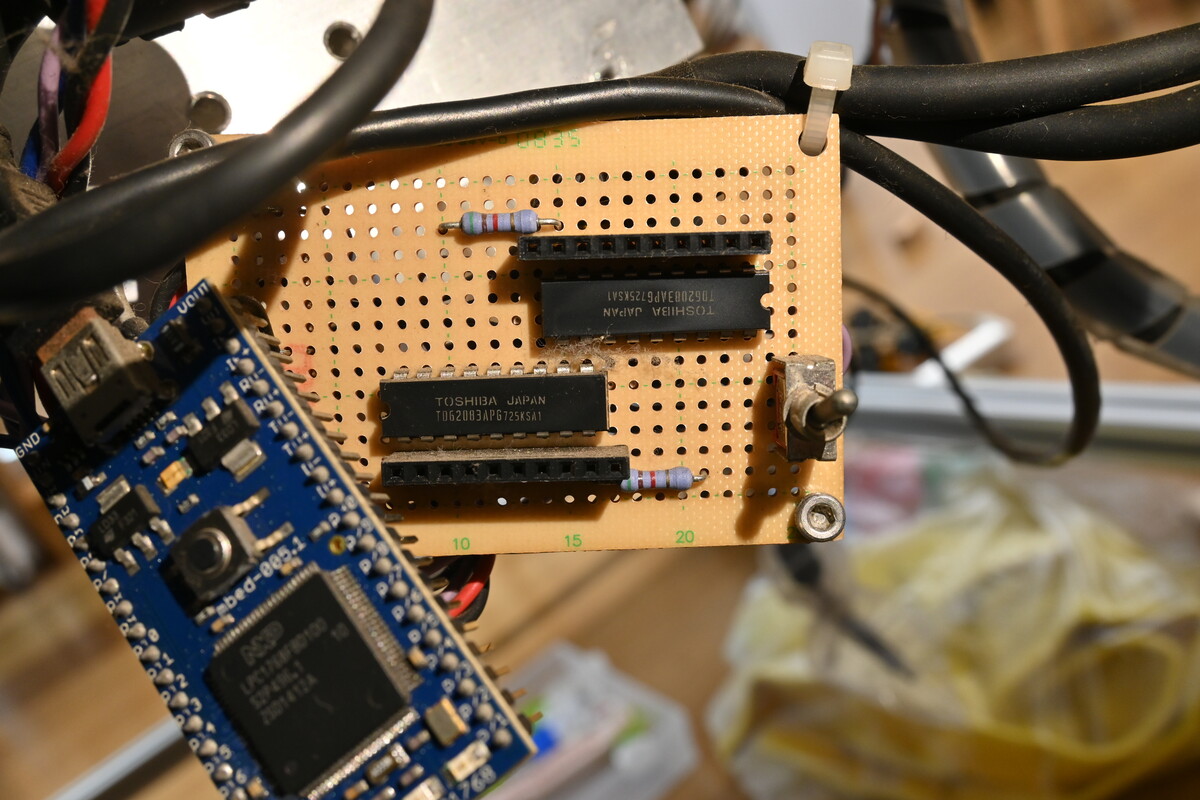
型番は TD62083APG です。ん?この番号に見覚えがありますね…。ああ、そうか。筆者が設計した自作 CPU のためのベースボード ComProc CPU Board Rev.4 で使っている TBD62083A と似ています!
この IC は 8ch のシンクドライバで、要するに NPN トランジスタが 8 個並んだものです。TBD62083A の方は NPN トランジスタではなく Nch MOSFET になっています。なぜこの IC が使われているのかは、後で回路を解析したときに判明します。
その他、5.1kΩ の抵抗が 2 本、トグルスイッチが 1 個付いています。
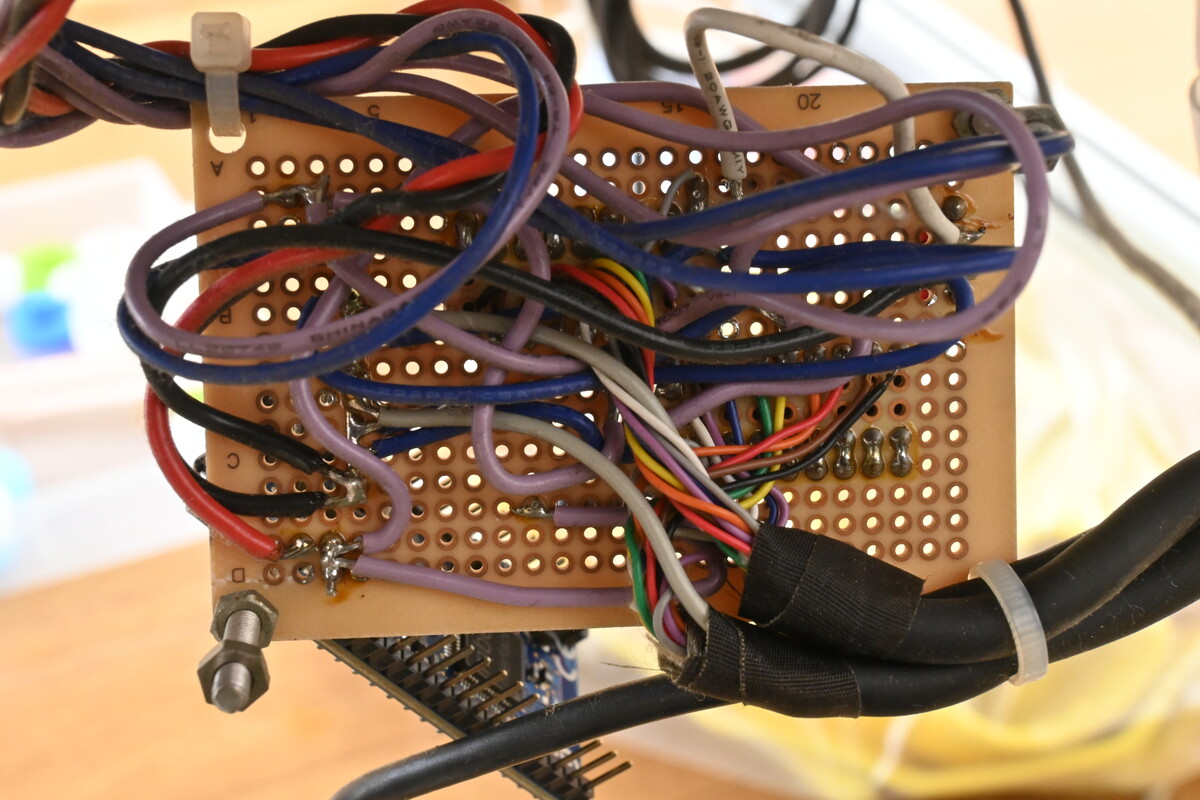
基板の裏側には配線があります。当時、プリント基板を設計・製造する技術や発想が無かったのだと思います。被覆導線を使って手配線されていて、回路を追いかけるのが結構大変です。配線同士が重なっていて、追いかけづらい…。頑張って配線を追って、復元した回路がこちらです。
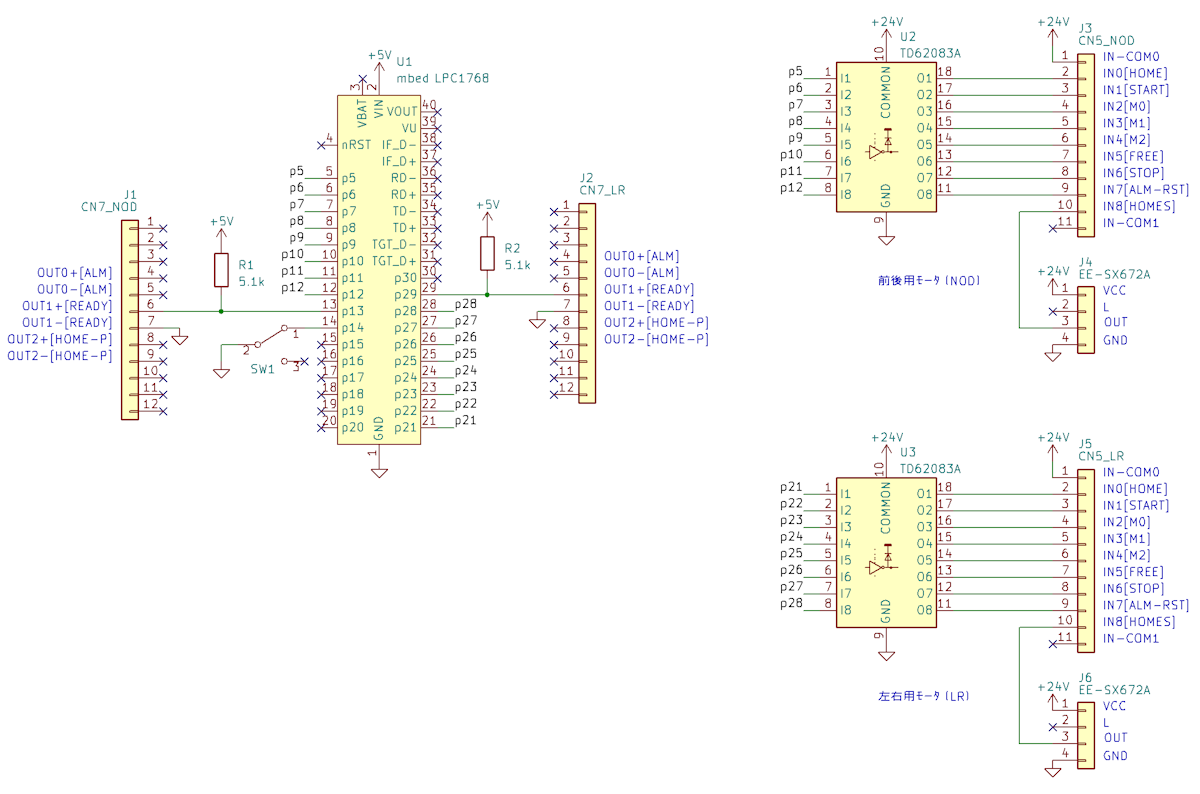
TD62083APG は、マイコンボードの出力電圧をモータードライバの入力電圧へと変換する役割を持っているようです。モータードライバ BXSD120-A の仕様書1によれば、入力端子は 24V で制御する必要があるようです。マイコンの I/O 出力は 3.3V ですので、TD62083APG を用いて電圧を変換しています。
CN5 の HOMES 入力には光センサの出力が接続されています。モータードライバの仕様書によれば、HOMES 入力は「原点復帰運転における、機械原点センサの入力」です。原点復帰運転はこのセンサが反応するまでモーターを回転させ、センサが反応した地点を原点と認識するわけです。
制御方法
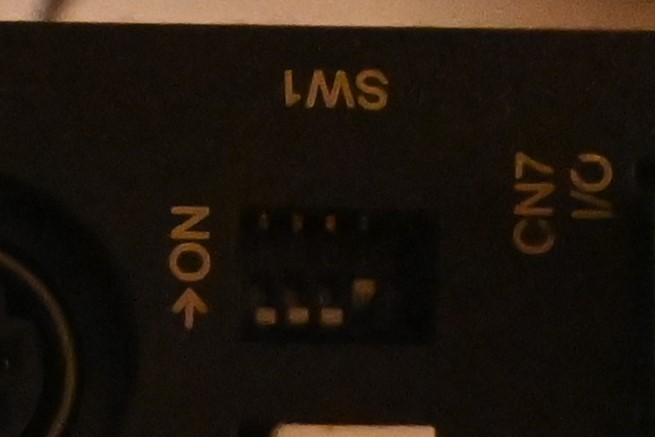
仕様書によれば、このモータードライバは 2 種類の制御方法が選べるようです。速度制御と位置制御です。どちらを使うかは SW1 で決めるようです。SW1 は下図の状態になっています。ON、OFF、OFF、OFF となっているため、位置制御モードのようです。
次に、実際にふじみんロボットを動かしてみて、マイコンからモータードライバに送られる信号を観察してみます。マイコンの p21~p25 から出る波形は下図の通りでした。
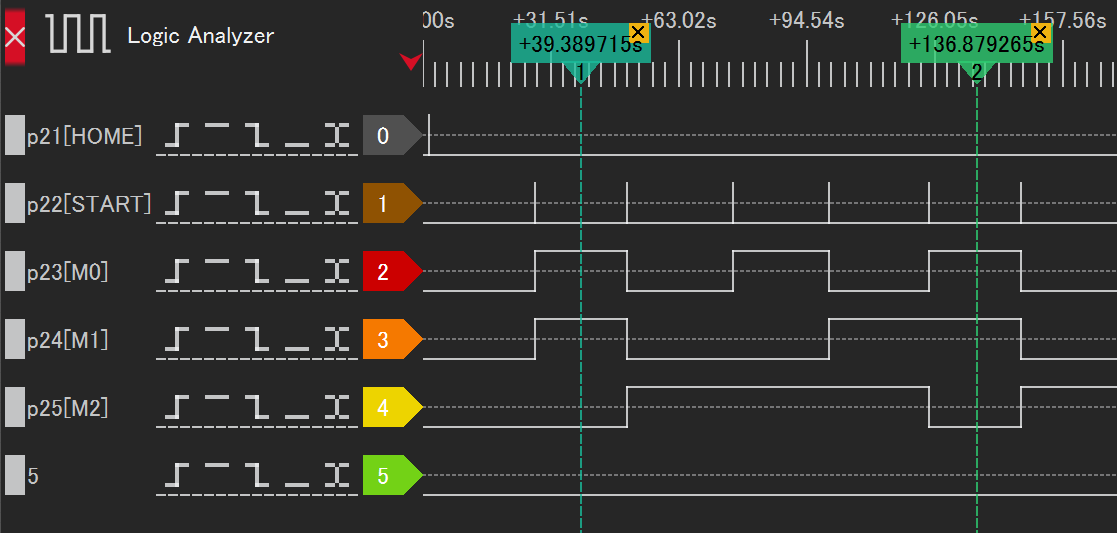
このとき、ふじみんロボットの動きは次の通りです。上図は、電源投入の直前に計測を始めてから左右 1.5 往復分の波形を表示しています。
- 電源投入直後から、顔を右向き・水平に動かし、原点復帰を行う
- 原点復帰後は、頷く動作を行う
- 頷く動作は CN5_NOD 側のモーターなので、上図には影響しない
- 頷き終わって顔が水平に戻ったら、左に回転し、まっすぐ前を向く
- 頷く&回転を、右、中央、左、中央、…と繰り返す
モーターの仕様書によれば、各信号の意味は次の通りです。
- HOME:原点復帰運転を開始する
- START:位置決め運転を開始する
- M0~M2:運転データ番号を選択する
波形と照らし合わせると、電源投入直後に HOME が一瞬 1 となり、その後は START と M0~M2 が使用されていることが分かります。運転データ番号は、時系列順に 0→3→4→5→6→3→4→…となっています。
運転データとパラメータ
各運転データ番号には、位置や加速が紐付けられています。それらのパラメータを確認しておきます。モータードライバの操作パネルを使って各パラメータを読み出しました。
| 運転データ番号 | 位置 | 運転速度 | 運転方式 | 加速時間 |
|---|---|---|---|---|
| 3 | 4,800 | 100 | 0 | 0.300 |
| 4 | 8,000 | 100 | 0 | 30.00 |
| 5 | 5,700 | 100 | 0 | 0.300 |
| 6 | 6,500 | 100 | 0 | 30.00 |
「位置」はステップ数です。仕様書によれば 1 ステップで 0.72°回転するそうです。すなわち 500 ステップで 360°です。これはモーター軸の回転角ですので、実際の回転角はギアヘッドの減速比を知る必要があります。

ギアヘッドの型番は GFS5G50 です。調べると減速比は 50 となっていて、モーターが 50 周すると出力軸が 1 周するはずです。モーター 50 周は 25,000 ステップに相当します。
「運転方式」は 0、すなわちインクリメンタルモードに設定されています。したがって、原点から見てモーターがどのくらい回転するかは、すべての「位置」を足せば分かります。3~6 の運転データ番号の「位置」を合計すると 25,000 になります。つまり 3→4→5→6 と動くことで、きっかり 1 周し、元の位置に戻ってくることになります。
「加速時間」の設定がバラバラなのが気になります。どうしてこんな設定になっているか、当時の記憶は全くありません。改めて考えると、加速時間は全て同じ設定で良いと思います。単位は秒ですから、0.3 などという設定は短すぎる気がします。
今回で回路や制御方式があらかた判明したので、次回はいよいよ「ふとした瞬間に止まってしまう」原因を探っていきます。
- [1]: 正確には BXSD120-A2 の仕様書を見ていますが、入出力の仕様は同じでしょう、きっと。
この記事を参照しているブログ内記事はありません。